
Deep Learning (18-4) - YOLOv5 포트홀 탐지 모델
YOLO (You Only Look Once)
포트홀 탐지 모델
YOLOv5 모델 다운로드
In [1]:
%cd /content
!git clone https://github.com/ultralytics/yolov5
%cd yolov5
!pip install -qr requirements.txt
Out [1]:
/content
Cloning into 'yolov5'...
remote: Enumerating objects: 14566, done.
remote: Counting objects: 100% (88/88), done.
remote: Compressing objects: 100% (62/62), done.
remote: Total 14566 (delta 44), reused 50 (delta 26), pack-reused 14478
Receiving objects: 100% (14566/14566), 13.68 MiB | 7.60 MiB/s, done.
Resolving deltas: 100% (10024/10024), done.
/content/yolov5
|████████████████████████████████| 182 kB 29.1 MB/s
|████████████████████████████████| 62 kB 1.4 MB/s
|████████████████████████████████| 1.6 MB 54.9 MB/s
데이터셋 다운로드
- 포트홀 데이터셋: https://public.roboflow.com/object-detection/pothole
In [2]:
!pwd
Out [2]:
/content/yolov5
In [3]:
%mkdir /content/yolov5/pothole
%cd /content/yolov5/pothole
!curl -L "https://public.roboflow.com/ds/p8RvsTNeEI?key=J6HYjrLfDA" > roboflow.zip; unzip roboflow.zip; rm roboflow.zip
Out [3]:
/content/yolov5/pothole
% Total % Received % Xferd Average Speed Time Time Time Current
Dload Upload Total Spent Left Speed
100 901 100 901 0 0 1912 0 --:--:-- --:--:-- --:--:-- 1912
100 46.0M 100 46.0M 0 0 9193k 0 0:00:05 0:00:05 --:--:-- 11.3M
Archive: roboflow.zip
extracting: README.dataset.txt
extracting: README.roboflow.txt
extracting: data.yaml
creating: test/
creating: test/images/
...
extracting: valid/labels/img-93_jpg.rf.7dc83bef4593a070f4cea15ebec8a527.txt
extracting: valid/labels/img-94_jpg.rf.26ce6c0878886e2b49b0191cf4f952bb.txt
In [4]:
# 파일 목록 불러오기
from glob import glob
train_img_list = glob('/content/yolov5/pothole/train/images/*.jpg')
test_img_list = glob('/content/yolov5/pothole/test/images/*.jpg')
valid_img_list = glob('/content/yolov5/pothole/valid/images/*.jpg')
len(train_img_list), len(test_img_list), len(valid_img_list)
Out [4]:
(465, 67, 133)
In [5]:
# 파일 목록 실제 파일로 저장
with open('/content/yolov5/pothole/train.txt', 'w') as f:
f.write('\n'.join(train_img_list)+'\n')
with open('/content/yolov5/pothole/test.txt', 'w') as f:
f.write('\n'.join(test_img_list)+'\n')
with open('/content/yolov5/pothole/valid.txt', 'w') as f:
f.write('\n'.join(valid_img_list)+'\n')
In [6]:
# yaml 파일 수정을 위한 함수
from IPython.core.magic import register_line_cell_magic
@register_line_cell_magic
def writetemplate(line, cell):
with open(line, 'w') as f:
f.write(cell.format(**globals()))
In [7]:
%cat /content/yolov5/pothole/data.yaml
Out [7]:
train: ../train/images
val: ../valid/images
nc: 1
names: ['pothole']
In [8]:
%%writetemplate /content/yolov5/pothole/data.yaml
train: ./pothole/train/images
test: ./pothole/test/images
val: ./pothole/valid/images
nc: 1
names: ['pothole']
In [9]:
%cat /content/yolov5/pothole/data.yaml
Out [9]:
train: ./pothole/train/images
test: ./pothole/test/images
val: ./pothole/valid/images
nc: 1
names: ['pothole']
모델 구성
In [10]:
import yaml
with open('/content/yolov5/pothole/data.yaml', 'r') as stream:
num_classes = str(yaml.safe_load(stream)['nc']) # 클래스 갯수 불러오기
num_classes
Out [10]:
'1'
In [11]:
# 받아온 모델 정보 확인
%cat /content/yolov5/models/yolov5s.yaml
Out [11]:
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
In [12]:
# 사본 커스텀 저장
%%writetemplate /content/yolov5/models/custom_yolov5s.yaml
# Parameters
nc: {num_classes} # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
In [13]:
# 수정 확인
%cat /content/yolov5/models/custom_yolov5s.yaml
Out [13]:
# Parameters
nc: 1 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
학습(Training)
img: 입력 이미지 크기 정의batch: 배치 크기 결정epochs: 학습 기간 개수 정의data: yaml 파일 경로cfg: 모델 구성 지정weights: 가중치에 대한 경로 지정name: 결과 이름nosave: 최종 체크포인트만 저장cache: 빠른 학습을 위한 이미지 캐시
In [14]:
!pwd
Out [14]:
/content/yolov5/pothole
In [15]:
%cd /content/yolov5/
Out [15]:
/content/yolov5
In [16]:
%%time
!python train.py --img 640 --batch 32 --epochs 100 --data ./pothole/data.yaml \
--cfg ./models/custom_yolov5s.yaml --name pothole_result --cache
Out [16]:
train: weights=yolov5s.pt, cfg=./models/custom_yolov5s.yaml, data=./pothole/data.yaml, hyp=data/hyps/hyp.scratch-low.yaml, epochs=100, batch_size=32, imgsz=640, rect=False, resume=False, nosave=False, noval=False, noautoanchor=False, noplots=False, evolve=None, bucket=, cache=ram, image_weights=False, device=, multi_scale=False, single_cls=False, optimizer=SGD, sync_bn=False, workers=8, project=runs/train, name=pothole_result, exist_ok=False, quad=False, cos_lr=False, label_smoothing=0.0, patience=100, freeze=[0], save_period=-1, seed=0, local_rank=-1, entity=None, upload_dataset=False, bbox_interval=-1, artifact_alias=latest
github: up to date with https://github.com/ultralytics/yolov5 ✅
YOLOv5 🚀 v7.0-37-gb2f94e8 Python-3.8.16 torch-1.13.0+cu116 CUDA:0 (Tesla T4, 15110MiB)
hyperparameters: lr0=0.01, lrf=0.01, momentum=0.937, weight_decay=0.0005, warmup_epochs=3.0, warmup_momentum=0.8, warmup_bias_lr=0.1, box=0.05, cls=0.5, cls_pw=1.0, obj=1.0, obj_pw=1.0, iou_t=0.2, anchor_t=4.0, fl_gamma=0.0, hsv_h=0.015, hsv_s=0.7, hsv_v=0.4, degrees=0.0, translate=0.1, scale=0.5, shear=0.0, perspective=0.0, flipud=0.0, fliplr=0.5, mosaic=1.0, mixup=0.0, copy_paste=0.0
ClearML: run 'pip install clearml' to automatically track, visualize and remotely train YOLOv5 🚀 in ClearML
Comet: run 'pip install comet_ml' to automatically track and visualize YOLOv5 🚀 runs in Comet
TensorBoard: Start with 'tensorboard --logdir runs/train', view at http://localhost:6006/
Downloading https://ultralytics.com/assets/Arial.ttf to /root/.config/Ultralytics/Arial.ttf...
100% 755k/755k [00:00<00:00, 157MB/s]
Downloading https://github.com/ultralytics/yolov5/releases/download/v7.0/yolov5s.pt to yolov5s.pt...
100% 14.1M/14.1M [00:00<00:00, 324MB/s]
from n params module arguments
0 -1 1 3520 models.common.Conv [3, 32, 6, 2, 2]
1 -1 1 18560 models.common.Conv [32, 64, 3, 2]
2 -1 1 18816 models.common.C3 [64, 64, 1]
3 -1 1 73984 models.common.Conv [64, 128, 3, 2]
4 -1 2 115712 models.common.C3 [128, 128, 2]
5 -1 1 295424 models.common.Conv [128, 256, 3, 2]
6 -1 3 625152 models.common.C3 [256, 256, 3]
7 -1 1 1180672 models.common.Conv [256, 512, 3, 2]
8 -1 1 1182720 models.common.C3 [512, 512, 1]
9 -1 1 656896 models.common.SPPF [512, 512, 5]
10 -1 1 131584 models.common.Conv [512, 256, 1, 1]
11 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
12 [-1, 6] 1 0 models.common.Concat [1]
13 -1 1 361984 models.common.C3 [512, 256, 1, False]
14 -1 1 33024 models.common.Conv [256, 128, 1, 1]
15 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
16 [-1, 4] 1 0 models.common.Concat [1]
17 -1 1 90880 models.common.C3 [256, 128, 1, False]
18 -1 1 147712 models.common.Conv [128, 128, 3, 2]
19 [-1, 14] 1 0 models.common.Concat [1]
20 -1 1 296448 models.common.C3 [256, 256, 1, False]
21 -1 1 590336 models.common.Conv [256, 256, 3, 2]
22 [-1, 10] 1 0 models.common.Concat [1]
23 -1 1 1182720 models.common.C3 [512, 512, 1, False]
24 [17, 20, 23] 1 16182 models.yolo.Detect [1, [[10, 13, 16, 30, 33, 23], [30, 61, 62, 45, 59, 119], [116, 90, 156, 198, 373, 326]], [128, 256, 512]]
custom_YOLOv5s summary: 214 layers, 7022326 parameters, 7022326 gradients, 15.9 GFLOPs
Transferred 342/349 items from yolov5s.pt
AMP: checks passed ✅
optimizer: SGD(lr=0.01) with parameter groups 57 weight(decay=0.0), 60 weight(decay=0.0005), 60 bias
albumentations: Blur(p=0.01, blur_limit=(3, 7)), MedianBlur(p=0.01, blur_limit=(3, 7)), ToGray(p=0.01), CLAHE(p=0.01, clip_limit=(1, 4.0), tile_grid_size=(8, 8))
train: Scanning /content/yolov5/pothole/train/labels... 465 images, 0 backgrounds, 0 corrupt: 100% 465/465 [00:00<00:00, 1802.22it/s]
train: New cache created: /content/yolov5/pothole/train/labels.cache
train: Caching images (0.4GB ram): 100% 465/465 [00:02<00:00, 186.01it/s]
val: Scanning /content/yolov5/pothole/valid/labels... 133 images, 0 backgrounds, 0 corrupt: 100% 133/133 [00:00<00:00, 691.88it/s]
val: New cache created: /content/yolov5/pothole/valid/labels.cache
val: Caching images (0.1GB ram): 100% 133/133 [00:01<00:00, 70.82it/s]
AutoAnchor: 4.30 anchors/target, 0.999 Best Possible Recall (BPR). Current anchors are a good fit to dataset ✅
Plotting labels to runs/train/pothole_result/labels.jpg...
Image sizes 640 train, 640 val
Using 2 dataloader workers
Logging results to runs/train/pothole_result
Starting training for 100 epochs...
Epoch GPU_mem box_loss obj_loss cls_loss Instances Size
0/99 7.32G 0.1145 0.03855 0 112 640: 100% 15/15 [00:09<00:00, 1.55it/s]
Class Images Instances P R mAP50 mAP50-95: 100% 3/3 [00:03<00:00, 1.13s/it]
all 133 330 0.00405 0.406 0.00702 0.00159
Epoch GPU_mem box_loss obj_loss cls_loss Instances Size
1/99 9.67G 0.09401 0.04007 0 80 640: 100% 15/15 [00:06<00:00, 2.39it/s]
Class Images Instances P R mAP50 mAP50-95: 100% 3/3 [00:01<00:00, 1.88it/s]
all 133 330 0.19 0.13 0.0611 0.0167
...
Epoch GPU_mem box_loss obj_loss cls_loss Instances Size
98/99 9.67G 0.01908 0.01506 0 105 640: 100% 15/15 [00:05<00:00, 2.59it/s]
Class Images Instances P R mAP50 mAP50-95: 100% 3/3 [00:01<00:00, 2.19it/s]
all 133 330 0.775 0.724 0.76 0.483
Epoch GPU_mem box_loss obj_loss cls_loss Instances Size
99/99 9.67G 0.01938 0.01471 0 71 640: 100% 15/15 [00:05<00:00, 2.59it/s]
Class Images Instances P R mAP50 mAP50-95: 100% 3/3 [00:01<00:00, 2.10it/s]
all 133 330 0.792 0.713 0.764 0.488
100 epochs completed in 0.216 hours.
Optimizer stripped from runs/train/pothole_result/weights/last.pt, 14.4MB
Optimizer stripped from runs/train/pothole_result/weights/best.pt, 14.4MB
Validating runs/train/pothole_result/weights/best.pt...
Fusing layers...
custom_YOLOv5s summary: 157 layers, 7012822 parameters, 0 gradients, 15.8 GFLOPs
Class Images Instances P R mAP50 mAP50-95: 100% 3/3 [00:01<00:00, 1.52it/s]
all 133 330 0.767 0.708 0.759 0.488
Results saved to runs/train/pothole_result
CPU times: user 8.61 s, sys: 997 ms, total: 9.61 s
Wall time: 13min 46s
In [17]:
%load_ext tensorboard
%tensorboard --logdir runs
Out [17]:
<IPython.core.display.Javascript object>
In [18]:
!ls /content/yolov5/runs/train/pothole_result
Out [18]:
confusion_matrix.png results.png
events.out.tfevents.1671278074.2b026896312d.162.0 train_batch0.jpg
F1_curve.png train_batch1.jpg
hyp.yaml train_batch2.jpg
labels_correlogram.jpg val_batch0_labels.jpg
labels.jpg val_batch0_pred.jpg
opt.yaml val_batch1_labels.jpg
P_curve.png val_batch1_pred.jpg
PR_curve.png val_batch2_labels.jpg
R_curve.png val_batch2_pred.jpg
results.csv weights
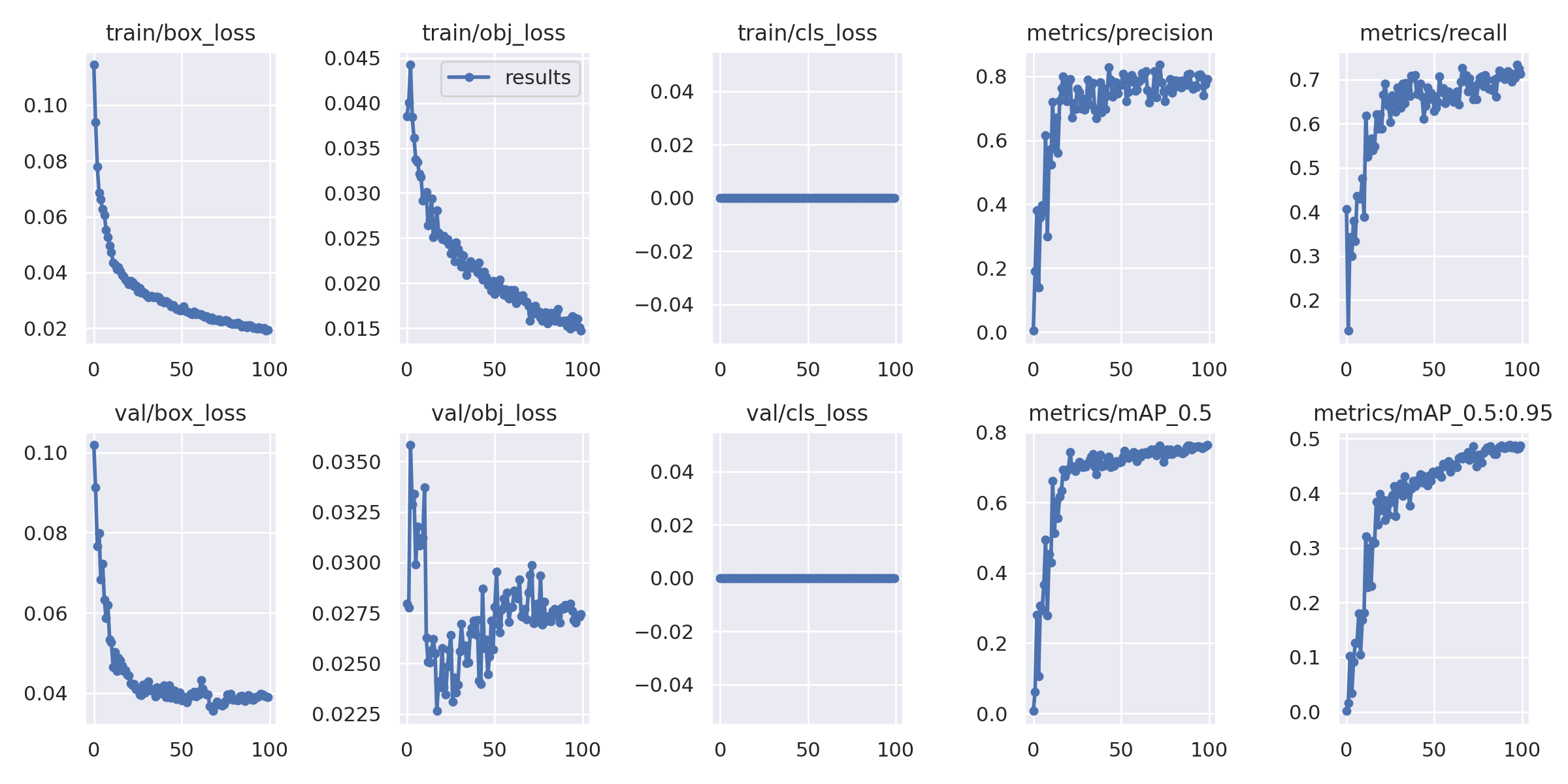
In [19]:
from IPython.display import Image
Image(filename='/content/yolov5/runs/train/pothole_result/results.png', width=800)
Out [19]:
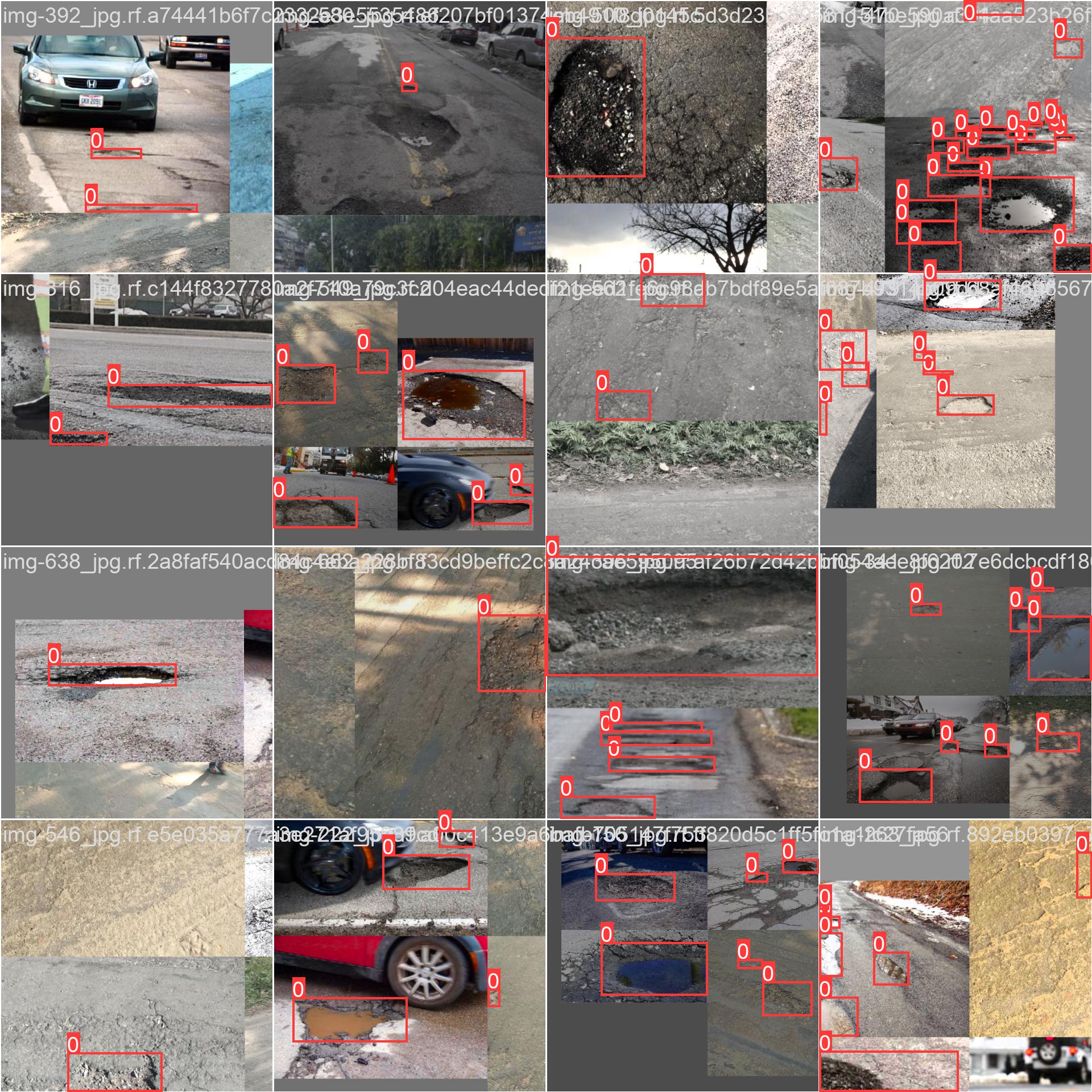
In [20]:
Image(filename='/content/yolov5/runs/train/pothole_result/train_batch0.jpg', width=800)
Out [20]:
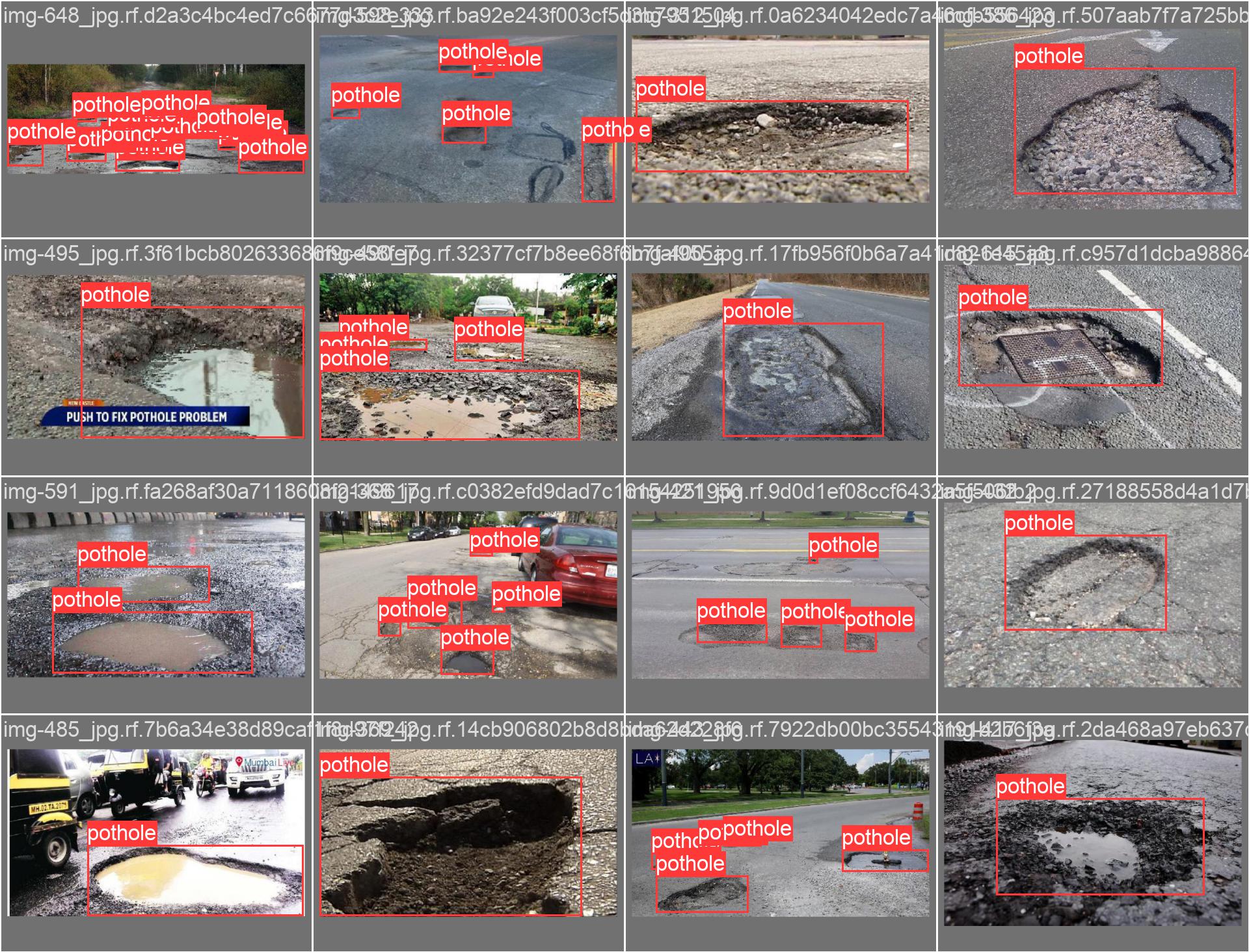
In [21]:
Image(filename='/content/yolov5/runs/train/pothole_result/val_batch0_labels.jpg', width=800)
Out [21]:
검증(Validation)
In [22]:
# validation data
!python val.py --weights runs/train/pothole_result/weights/best.pt \
--data ./pothole/data.yaml --img 640 --iou 0.65 --half
Out [22]:
val: data=./pothole/data.yaml, weights=['runs/train/pothole_result/weights/best.pt'], batch_size=32, imgsz=640, conf_thres=0.001, iou_thres=0.65, max_det=300, task=val, device=, workers=8, single_cls=False, augment=False, verbose=False, save_txt=False, save_hybrid=False, save_conf=False, save_json=False, project=runs/val, name=exp, exist_ok=False, half=True, dnn=False
YOLOv5 🚀 v7.0-37-gb2f94e8 Python-3.8.16 torch-1.13.0+cu116 CUDA:0 (Tesla T4, 15110MiB)
Fusing layers...
custom_YOLOv5s summary: 157 layers, 7012822 parameters, 0 gradients, 15.8 GFLOPs
val: Scanning /content/yolov5/pothole/valid/labels.cache... 133 images, 0 backgrounds, 0 corrupt: 100% 133/133 [00:00<?, ?it/s]
Class Images Instances P R mAP50 mAP50-95: 100% 5/5 [00:04<00:00, 1.18it/s]
all 133 330 0.757 0.718 0.755 0.484
Speed: 2.2ms pre-process, 7.5ms inference, 2.4ms NMS per image at shape (32, 3, 640, 640)
Results saved to runs/val/exp
In [23]:
# test data
!python val.py --weights runs/train/pothole_result/weights/best.pt \
--data ./pothole/data.yaml --img 640 --task test
Out [23]:
val: data=./pothole/data.yaml, weights=['runs/train/pothole_result/weights/best.pt'], batch_size=32, imgsz=640, conf_thres=0.001, iou_thres=0.6, max_det=300, task=test, device=, workers=8, single_cls=False, augment=False, verbose=False, save_txt=False, save_hybrid=False, save_conf=False, save_json=False, project=runs/val, name=exp, exist_ok=False, half=False, dnn=False
YOLOv5 🚀 v7.0-37-gb2f94e8 Python-3.8.16 torch-1.13.0+cu116 CUDA:0 (Tesla T4, 15110MiB)
Fusing layers...
custom_YOLOv5s summary: 157 layers, 7012822 parameters, 0 gradients, 15.8 GFLOPs
test: Scanning /content/yolov5/pothole/test/labels... 67 images, 0 backgrounds, 0 corrupt: 100% 67/67 [00:00<00:00, 509.49it/s]
test: New cache created: /content/yolov5/pothole/test/labels.cache
Class Images Instances P R mAP50 mAP50-95: 100% 3/3 [00:02<00:00, 1.24it/s]
all 67 154 0.825 0.779 0.822 0.524
Speed: 0.2ms pre-process, 8.8ms inference, 3.4ms NMS per image at shape (32, 3, 640, 640)
Results saved to runs/val/exp2
추론(Inference)
In [24]:
%ls runs/train/pothole_result/weights/
Out [24]:
best.pt last.pt
In [25]:
!python detect.py --weights runs/train/pothole_result/weights/best.pt \
--img 640 --conf 0.4 --source ./pothole/test/images
Out [25]:
detect: weights=['runs/train/pothole_result/weights/best.pt'], source=./pothole/test/images, data=data/coco128.yaml, imgsz=[640, 640], conf_thres=0.4, iou_thres=0.45, max_det=1000, device=, view_img=False, save_txt=False, save_conf=False, save_crop=False, nosave=False, classes=None, agnostic_nms=False, augment=False, visualize=False, update=False, project=runs/detect, name=exp, exist_ok=False, line_thickness=3, hide_labels=False, hide_conf=False, half=False, dnn=False, vid_stride=1
YOLOv5 🚀 v7.0-37-gb2f94e8 Python-3.8.16 torch-1.13.0+cu116 CUDA:0 (Tesla T4, 15110MiB)
Fusing layers...
custom_YOLOv5s summary: 157 layers, 7012822 parameters, 0 gradients, 15.8 GFLOPs
image 1/67 /content/yolov5/pothole/test/images/img-105_jpg.rf.3fe9dff3d1631e79ecb480ff403bcb86.jpg: 640x640 1 pothole, 12.3ms
image 2/67 /content/yolov5/pothole/test/images/img-107_jpg.rf.2e40485785f6e5e2efec404301b235c2.jpg: 640x640 2 potholes, 12.4ms
...
image 66/67 /content/yolov5/pothole/test/images/img-82_jpg.rf.851a545b1b004e7303844e4779d3272c.jpg: 640x640 2 potholes, 11.2ms
image 67/67 /content/yolov5/pothole/test/images/img-98_jpg.rf.667209472947ff4d519f65c6e206a7c3.jpg: 640x640 2 potholes, 9.6ms
Speed: 0.4ms pre-process, 10.1ms inference, 0.8ms NMS per image at shape (1, 3, 640, 640)
Results saved to runs/detect/exp
In [26]:
import random
image_name = random.choice(glob('runs/detect/exp/*.jpg'))
display(Image(filename=image_name))
Out [26]:

모델 내보내기
In [27]:
from google.colab import drive
drive.mount('/content/drive')
Out [27]:
Mounted at /content/drive
In [28]:
%cp /content/yolov5/runs/train/pothole_result/weights/best.pt '/content/drive/MyDrive/Colab Notebooks/deep_learning/model/18_yolov5_pothole'
Reference
- 이 포스트는 SeSAC 인공지능 자연어처리, 컴퓨터비전 기술을 활용한 응용 SW 개발자 양성 과정 - 심선조 강사님의 강의를 정리한 내용입니다.
댓글남기기